INTRODUCTION
Field exercise four was a two-part task. The first task was to log two hours of Unmanned Aerial System (UAS) flight time using the UAS flight simulator program (Real Flight 7.5). Logging two hours on the UAS flight simulator was done in order to perform the next task which was to plan two UAS mapping missions. By drawing on the 2 hours of previously logged UAS simulator experience, students would be more accurate regarding their selected missions' data acquisition methods. Gaining experience with the different types of UAS platforms through flight simulation put the students in real scenarios that arise in the field. Some of these scenarios included difficult terrain, high winds, and poor visibility. Using the UAS flight simulator also equipped students with the knowledge of the advantages and disadvantages of the different UAS platforms available. Two hours of logged flights might sound like an eternity, but it was really only enough time to scratch the surface of a UAS's data acquisition potential. Besides learning about an Unmanned Aerial Systems different potentials for data acquisition, students of course also became more comfortable with actually flying the different platforms!
Unmanned Aerial System Overview
Unmanned Aerial Systems (UASs) have the potential to completely change geospatial technology as the world knows it. UASs are cheap to purchase and operate, versatile in design, quick to produce imaging results, and they're easier to operate than a manned aircraft. UASs can even be programmed to fly their desired route without a pilot ever manually controlling the UAS (for safety reasons there should always be a pilot on standby to manually take over if necessary). Instead of hiring a highly expensive manned aircraft that may cost tens of thousands of dollars, a UAS can be deployed for a fraction of the cost. By simply attaching a light weight high tech camera to the UAS, it can function the same way an actual imagery aircraft does.
There are many different types of UAS's but the two broad categories that they fall under are fixed wing and rotary Unmanned Aerial Vehicles (UAVs).
A fixed wing UAV is any vehicle that utilizes a simple airplane design where lift is achieved through lift and the manipulation of wing flaps. A Fixed wing UAVs propeller/propellers are usually powered by batteries or solar cells. When a fixed wing craft is battery powered it's flight time can be anywhere from 20 minutes to a few hours. The flight time is relatively short with battery power because the weight of the batteries is taxing on the aircraft itself. The recent emergence of light high powered batteries is the reason why battery powered UAVs have become popular in the first place. Eventually a UAV powered by battery will reach its battery limit where the weight of extra batteries outweighs the added power. This is why adding a larger battery for more flight time does not work. UAVs powered by solar cells on the other hand have much longer flight times as long as their is sufficient sunlight to power the cells. Both of these UAV types (battery/solar cell) can be automatically controlled via computer of manually via remote. When it comes to data acquisition, fixed wing UAVs are excellent at obtaining aerial imagery in long linear swaths over large areas. Fixed wing UAVs also have higher payload capabilities when compared with rotary UAVs because they have air lift to aid them in their flight (something rotary UAVs do not have). Figures 1 and 2 below are examples of a battery powered and solar cell powered fixed wing UAV respectively.
 |
| Figure 1: Depicts a fixed wing UAV with a single motor powered by battery |
 |
| Figure 2: Depicts a fixed wing UAV with multiple motors all powered by solar cells |
Rotary UAVs are vehicles that use a spinning propeller/propellers to obtain lift and flight. Rotary UAVs can have anywhere from one to eight rotors, and these rotors are normally powered by batteries. As is the case with battery powered fixed wing UAVs, battery powered rotary UAVs have notoriously short flight times. These flight times can be as little as ten minutes and rarely go over an hour. Such short flight times are due not only to the weight of the batteries, they are also short because rotary UAVs don't have wings to aid them in lift. Wind does not help to keep a rotary UAV afloat, it only makes it harder for it to stay in the air. This means that rotary UAVs have poor payload capacity. Even though they have short flight times, rotary UAVs are essential aerial image data acquisition because they can hover and move at extremely slow speeds. Figure 3 and 4 below are examples of a single and multiple rotor UAV respectively.
 |
| Figure 3: Depicts a battery powered UAV with a single rotor located on top of the craft (helicopter) |
 |
| Figure 4: Depicts a battery powered UAV with multiple rotors. This is a true UAV image because the aircraft has an imaging device (camera) mounted to its bottom. |
METHODOLOGY
Flight Simulator and Flight Log
In table 1 below my flight simulator log and ensuing notes can be viewed.
Table 1: contains the following fields: trial #, platform, platform type, venue, view, flight time, crash description, and notes.


Experiencing the strengths and weaknesses of the different types of UAVs on the flight simulator was essential to understanding how each one can collect aerial imagery. As seen above in table 1, a nose or chase view of the UAV was the easiest way to navigate rough terrain. The more realistic or fixed view was the toughest of views. Wind greatly affected the fixed wing UAVs while it did not have as much of an effect on the rotary UAVs. This piece of knowledge may come in handy on days when storms or high winds are predicted. While the fixed wing UAVs generally held speeds over 40 mph, the rotary UAVs hovered and could be made to inch along if necessary. This was especially easy with the hexacopter 780 which had much better handling than the gaui 330 X quad-copter. Being able to hover and move slowly can be a huge advantage in certain scenarios involving the collection of aerial imagery. In other scenarios the speed of a fixed wing aircraft may be the desired UAV feature.
UAS Mission Planning
Now that I have gained some experience regarding the strengths and weaknesses of the different UAV types using the flight simulator, it's time to put that knowledge into action regarding aerial imagery scenarios. My job is to plan out the best way to utilize a specific UAS in order to solve
presented issues regarding two aerial imagery scenariosScenario 1: A mining company wants to get a better idea of the volume they remove each week. They don’t have the money for LiDAR, but want to engage in 3D analysis
In order to determine the volume of fill removed from an open pit mine a three dimensional image of the mine is required to produce a DEM (digital elevation model) of the mine. Obtaining these three dimensional images can be done through a Photogrammetry camera systems mounted on a fixed wing UAV. A fixed wing UAV will use a long flight path with the ability to make multiple passes of the same area at a higher rate than a rotary UAV. Photogrammetry camera systems have automated film advance and exposure controls, as well as long continuous rolls of film. Aerial photographs should be taken in continuous sequence with an approximate 60% overlap. This overlap area of adjacent images enables 3 dimensional analysis for extraction of point elevations and contours. Once the images have been shot by the fixed wing UAV, a technique called least squares stereo matching can be used to produce a dense array of x, y, z data. This is commonly called a point cloud. A point cloud is a set of data points displayed in a coordinate system to represent the external surface of an object as shown in figure 5 below. An interpolation technique such as kriging is used to "smooth" the surface of the data.
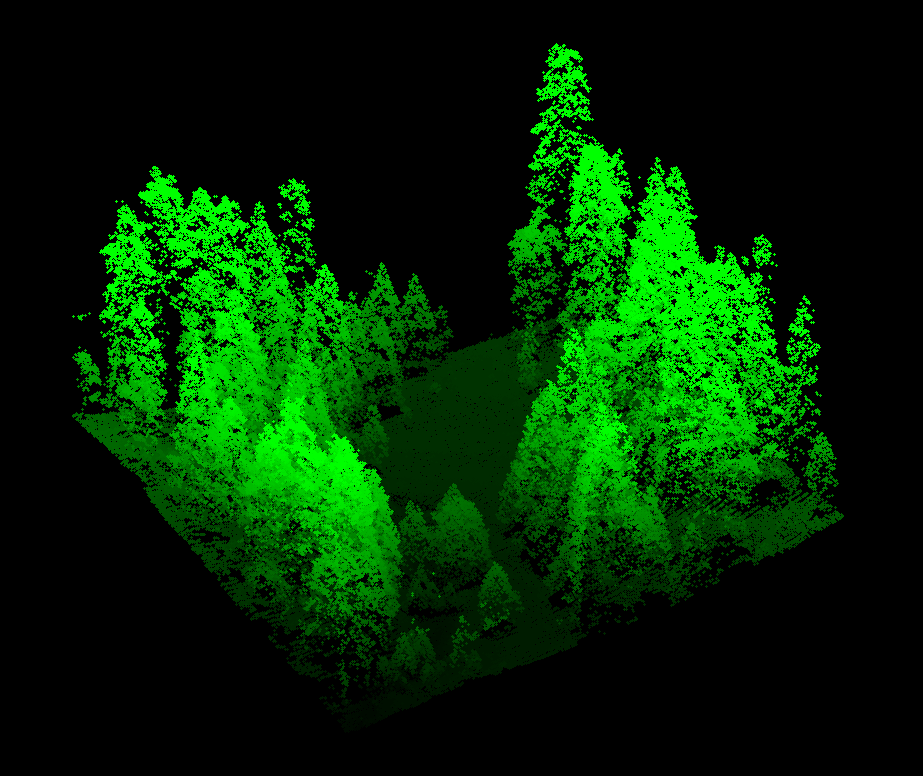 |
Figure 5. A point cloud representation of a section of forest. The spaces in the images show where data was not collected. Since the data is in the form of points there is bound to be numerous gaps in the data. An interpolation technique is used to fill in the gaps using data from the points to estimate the data for the gaps.
A DEM image like the one in figure 6 below can then be modeled in ArcGIS to accurately reflect contours of the mine as well as the elevation levels of the mine.

Figure 6. An example of a three dimensional DEM with the color gradient representing elevation; the more red the higher, the more blue, the lower.
Since the elevation of the mine will be known from the first DEM created, subsequent missions with the UAS to create new point clouds will reflect elevation changes. From these elevation changes in the mine a volume analysis can be run to determine how much fill has been removed.
Obtaining an elevation point cloud with a fixed wing UAS equipped with a photogrammetry camera system, is much faster and efficient than manually surveying the mine. UAS missions can be done as often as needed with relative ease, saving your company large amounts of time and ultimately money. This method is not as accurate as using LIDAR data, but it is much cheaper and less taxing on the computer creating the DEMs. If you were to take weekly readings of the mine using LIDAR you would spend a fortune on data collection. I see photogrammetry as your most viable option if you are set on taking weekly volume tests.
Scenario 2:
An
atmospheric chemist is looking to place an ozone monitor, and other
meteorological instruments onboard a UAS. She wants to put this over Lake
Michigan, and would like to have this platform up as long as possible, and out
several miles if she can.
An Unmanned aerial vehicle (UAV) that can be equipped with an ozone detector and fly for as long as possible are the specs. Using a fixed wing solar cell powered UAS is going to be the best option here. This is, however, completely dependent on budget constraints. A reliable solar cell powered UAV that can fly in the upper atmosphere for years at a time will cost nine million dollars. This type of UAV is basically one step under a satellite and requires an extensive unmanned aerial system (UAS) monitoring team. In figure seven below a sophisticated solar cell powered UAV is pictured.

A cheaper fixed wing UAV powered by solar cells could also be used and it could be had at only a fraction of the cost. This type of UAV would not fly in the upper atmosphere; therefor, it could only be deployed on days where there's ample sunlight to power it. As long as there is enough sunlight, however, the sky is literally the limit. Ozone detectors can weigh as little as a pound so payload should not be an issue for either UAV option. Both UAV options will require a monitoring team of at least three people to keep tabs on the aircraft. This three person operation is what creates an unmanned aerial system. Because visual contact will not be maintained at all times with the UAV, it will be necessary to equip it with a nose camera so a first person view can be referenced if necessary. The job of keeping visual contact with the UAV goes to the spotter or aircraft detail. Actively collecting ozone data is done through a command and control link set up. This will be the job of the person actually conducting the scientific research or data acquisitioner. The UAV will have to have some place to send the acquired data. This is normally a computer station and it is run by the engineer. A full briefing of an UAS can be perused here.
|
No comments:
Post a Comment